2.2 Требования и методика подбора видеокамер¶
В программе «Автомаршал» могут использоваться несколько основных видов видеокамер:
2.2.1 Аналоговые видеокамеры¶
Одна аналоговая видео камера может охватывать часть дороги шириной 2~2.5 метра.
Захват видео с аналоговых камер осуществляется с помощью плат видеоввода или TV Тюнера. Подбор устройств видеоввода описан в разделе.
Требования к характеристикам камеры¶
Аналоговые камеры должны обладать следующими характеристиками:
- Стандарт видеосигнала: CCIR (PAL);
- Разрешение не ниже 500 ТВЛ;
- Чувствительность не хуже 0,01 лк без учета режима Sens-Up;
- Возможность установки фиксированного значения электронного затвора (1/500, 1/1000, 1/2000 сек);
- Цветные камеры должны обладать полноценным режимом День/Ночь с убираемым отсекающим ИК фильтром;
- Рекомендуем использовать черно-белые или цветные аналоговые камеры с расширенным динамическим диапазоном с АРД объективами.
ВАЖНО: НЕ РЕКОМЕНДУЕМ ИСПОЛЬЗОВАТЬ АНАЛОГОВЫЕ ВИДЕОКАМЕРЫ НА ЧИПЕ SONY EFIO-E. МЫ ПРОТЕСТИРОВАЛИ НЕСКОЛЬКО ПОДОБНЫХ КАМЕР, ОНИ ПРИ УСТАНОВКЕ НУЖНЫХ ПАРАМЕТРОВ (ФИКСИРОВАННОЕ ЗНАЧЕНИЕ ЭЛЕКТРОННОГО ЗАТВОРА) ПЛОХО РАБОТАЮТ В ЯРКИЙ СОЛНЕЧНЫЙ ДЕНЬ (С НИХ ПОСТУПАЕТ ПОЛНОСТЬЮ БЕЛОЕ ПЕРЕСВЕЧЕННОЕ ИЗОБРАЖЕНИЕ).
Рекомендуемые модели аналоговых камер¶
Камеры тестируются техническими специалистами нашей компании на предмет пригодности совестного использования с ПО Автомаршал. К рекомендуемым относятся те модели камер, видеоизображение с которых признано пригодным для распознавания в различных условиях эксплуатации.
Протестированные Рекомендуемые модели аналоговых камер:
- CN3-CH2-VFA50IR DNR
- CN7-CH2-VFA50IR DNRP
- JETEK JTW-8620TDN-V550IR
- JETEK JTW-6600DN-V650IR
- Samsung SCC-B2335P - снята с производства Объектив и термокожух приобретаются отдельно
- Samsung SCB-3001P Объектив и термокожух приобретаются отдельно
- Bosch LTC-0385 - снимается с производства в конце октября 2014 Объектив и термокожух приобретаются отдельно
- Bosch REG-L1
- MINTRON MTV-13W1C Объектив и термокожух приобретаются отдельно
- QWONN QN-B309 (LCL-903K) - снята с производства Объектив и термокожух приобретаются отдельно
- QWONN QN-B320 (LCL-903Q) - снята с производства Объектив и термокожух приобретаются отдельно
- QWONN QN-B209 - снята с производства Объектив и термокожух приобретаются отдельно
- QWONN QN-B220 - снята с производства Объектив и термокожух приобретаются отдельно
- WATEC WAT-902H2 ULTIMATE - снята с производства Объектив и термокожух приобретаются отдельно
- ТВН-259А (СпецТелеТехника) (со встроенной ИК- подсветкой)
2.2.2 Цифровые IP камеры¶
Одна IP камера высокого качества с изображениями высокого разрешения может контролировать несколько полос движения автотранспорта и может успешно заменить несколько аналоговых камер.
Поддерживается работа с цифровыми IP камерами по протоколу MJPEG (JPEG) over HTTP. В тестовом режиме поддерживается протокол RTSP.
В большинстве случаев параметры подключения к камере по протоколам HTTP (MJPEG или JPEG) и RTSP (H.264) указаны в документации к камере, в других случаях данные для подключения необходимо запросить у производителя оборудования.
Требования к характеристикам камеры:¶
- Размер матрицы не менее 1/2,8;
- Чувствительность не хуже 0,01 лк без учета режима Sens-Up;
- Возможность установки фиксированного значения электронного затвора (1/500, 1/1000, 1/2000 сек);
- Цветные камеры должны обладать полноценным режимом День/Ночь с убираемым отсекающим ИК фильтром;
- Максимальная частота кадров при определенном разрешении. Обычно при увеличении разрешения кадров уменьшается частота кадров. Также во многих дешевых IP камерах максимальная частота кадров не превышает 10 fps. Для распознавания автомобильных номеров необходима частота формирования от 15 до 25 кадров в секунду. В документации указывается максимальная частота кадров при каждом поддерживаемом разрешении.
- Рекомендуем использовать черно-белые или цветные IP камеры с расширенным динамическим диапазоном с АРД объективами.
- Желательно использовать камеры с расширенным динамическим диапазоном (WDR - wide dynamic range).
Особенности использования IP камер:¶
- При нестабильном или перегруженном сетевом соединении частота кадров, поступающих с камеры в программу «Автомаршал», может значительно снижаться. В некоторых случаях (например, при плохом wi-fi соединении) изображения могут вообще не поступать в программу «Автомаршал»;
- Изображения с IP камер обладают высоким разрешением, поэтому для их обработки в программе «Автомаршал» на компьютере необходимо использовать более мощный процессор, чем в случае с аналоговыми камерами.
Рекомендуемые модели IP камер:¶
http://www.mallenom.ru/Docs/Automarshal_IP-cameras.pdf
2.3 Цифровые USB камеры (например, web-камеры)¶
- Поддерживается работа с USB камерами, которые имеют DirectShow совместимые драйвера;
- При выборе подобных камер следует обращать внимание на их характеристики и на особенности используемых объективов. Например, при использовании web-камер расстояние от номера машины до камеры может быть не больше 3-5 метров (зависит от объектива).
- Кроме web-камер могут использоваться и специализированные USB видеокамеры высокого качества.
- При недостаточной освещенности зоны контроля рекомендуется использовать дополнительные средства освещения (ИК или галогенные прожекторы).
Проверка совместимости¶
Для проверки совместимости ПО "Автомаршал" с устройством видеоввода необходимо воспользоваться программой VideoTest. В архиве также имеется краткое описание по использованию программы с различными устройствами видеоввода.
Общие рекомендации¶
Проверка видеокамер на пригодность для распознавания автономеров¶
Если имеется модель камеры, которую нужно проверить, то необходимо выполнить следующие действия:
1) нужно созвониться с производителями (или с их представительством в России) камер и уточнить:
1.1) можно ли на камере устанавливать фиксированное время выдержки (электронный затвор, shutter)
- для распознавания автономеров часто требуется фиксированная выдержка - 1/500 или 1/1000 секунды 1.2) имеется ли у камеры механический убираемый ИК фильтр 1.3) поддерживает ли камера передачу видео по протоколу MJPEG over HTTP
- т.е. камере посылается HTTP запрос, а камера в ответ должна послать jpeg изображение (или MJPEG поток по HTTP) 1.4) если пункт 1.3 поддерживается камерой, то обязательно необходимо узнать строки подключения к камере для получения jpeg изображений
- т.е. что мы должны послать камере по HTTP, чтобы она нам ответила изображением или MJPEG потоком по HTTP например, в камерах микродиджитал это описано в документации следующим образом:
Запрос fwcamimg.cgi
It can get a JPEG image. That is snapshot, not stream of JPEG Image
Query Syntax :
http://
FwModId=
PortId=
FwCgiVer=
Т.е. мы сможем полчить с камеры изображение, указав в нашей программе следующие параметры подключения:
Адрес: 10.20.30.40/cgi-bin
Изображение: fwcamimg.cgi?FwModId=0&PortId=0&FwCgiVer=0x0001
Тип потока: JPG
Т.е. в пункте 1.4 нужно предоставить строку подключения к данной камере.
Итогом проверки камеры на пригодность является следующая информация:
Камера ....
пункт 1.1 +
пункт 1.2 +
пункт 1.3 +
пункт 1.4 +
Адрес: ...
Изображение: ...
Тип потока: ...
Также желательно указывать на каком расстоянии от камеры смогут распознаваться номера машин.
Например, для IP камер с разрешением HD (720p):
1) если объектив 3-9 мм, то распознавание на расстоянии 5-6 метров
2) если объектив 3-19 мм, то распознавание на расстоянии до 10 метров
3) если объектив 5-50 мм, то распознавание на расстоянии до 25-30 метров
Тут имеется ввиду именно "уверенное распознавание"
ТАКИМ ОБРАЗОМ
Если все пункты выполнены успешно и четко прописано, как подключаться к камере (т.е. указана строка подключения), то только после этого считается,
что камера по своим характеристикам и возможностям подходит для распознавания автономеров и ее можно будет использовать в Автомаршале.
Далее эту камеру еще надо проверить на практике.
Камера подключается к Автомаршалу и настраивается для распознавания автономеров.
Если номера распознаются успешно, то камера считается пригодной для использова
Многие камеры поставляются в герметичном кожухе с ИК подсветкой. Подсветка включается при низкой освещенности. При этом, если камера смотрит навстречу движению машин, когда машины подъезжает из-за света фар подсветка выключается. Также у многих камер нельзя в меню настроить, чтобы подсветка была всегда включена. Например, в дневное время подсветка выключается, но, если бы она была включена, то номер машины был бы лучше виден на изображениях и он бы лучше распознавался.
В итоге, рекомендуем любо настраивать в параметрах камеры, чтобы подсветка была всегда включена. Для этого может потребоваться выбор определенного режима работы камеры (например, ночной режим). Либо нужно открутить переднее стекло камеры и закрыть датчик света. Это приведет к тому, что подсветка будет включена всегда. Но вскрытие корпуса камеры может привести к потере гарантии.
Подбор фокусного расстояния¶
При выборе камер со встроенными объективом или при выборе объектива в отдельности необходимо учитывать, что высокий уровень распознавания ГРЗ достигается при их размере на изображении не менее 70*15 px.
Для этого необходимо корректно подбирать фокусное расстояние объектива в соответствии с разрешением используемой камеры, физическими размерами ее матрицы и с учетом схемы установки камеры.
Установка камеры:¶

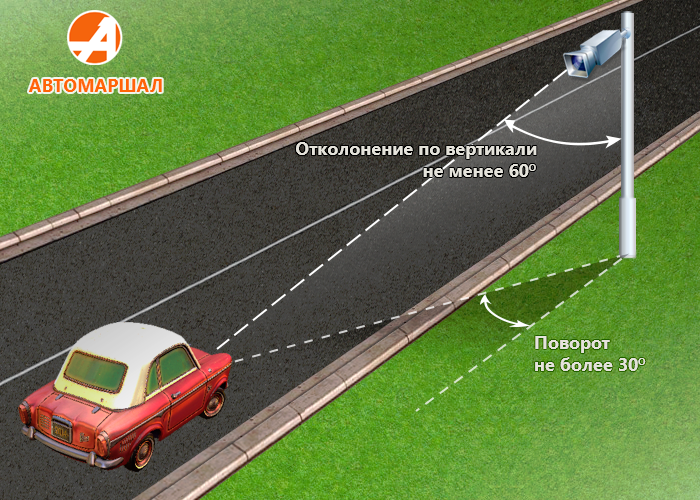
По данной схеме необходимо знать параметр L, который отвечает за расстояние от камеры до той части дороги, где будет распознаваться номер. Данный параметр будет использовать в дальнейших расчетах.
Угол наклона камеры β не должен превышать 25-30 градусов.
Горизонтальные углы наклона не должны превышать 25-30 градусов.
Физические размеры матрицы камеры в зависимости от ее типа¶
| Тип матрицы | Ширина матрицы, мм |
|---|---|
| 1/1.8" | 7.2 |
| 1/2" | 6.4 |
| 1/2.7" | 5.4 |
| 1/3" | 4.8 |
Остальные размеры при необходимости можно найти в Интернете.
В современных IP камерах могут использоваться широкоформатные матрицы, у которых физические размеры не совпадают с приведенными в таблице.
Для расчета фокусного расстояния f объектива используется следующая формула:

где m – ширина используемой матрицы (мм),
L – расстояние от камеры до той части дороги, где будет распознаваться номер (мм),
W – необходимая ширина поля обзора (мм).
Расстояние L от камеры до автомобильного номера в мм вычисляется по следующей упрощенной формуле:
.png)
Н и R размеры, указанные на схеме выше в мм.
Ширину поля обзора W в мм можно рассчитать по следующей формуле:
.png)
520 – реальная ширина автономера в мм,
70 – минимальная рекомендуемая ширина автономера на изображении в пикселах,
w – ширина всего изображения в пикселах.
Примеры расчетов¶
.png)
.png)
.png)
.png)
.png)